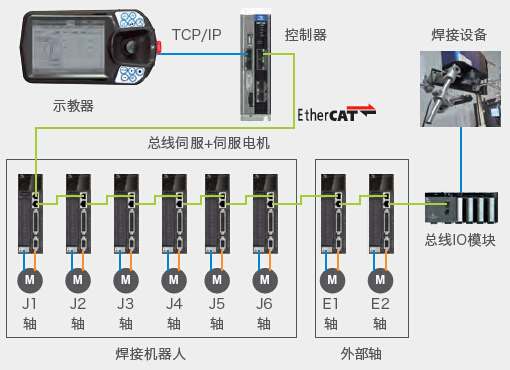
基于自主研发的机器人控制器IMC100R-E-X3,通过EtherCAT总线通讯方式,搭配IS620N总线型伺服和23位绝对式编码器电机,控制六关节机器人,并搭载远程总线IO模块,组成整套机器人系统,并通过扩展模块与焊接设备信号交互,主要用于弧焊、点焊等应用场合,并且适用于装配、去毛刺、打磨、上下料等应用领域。
焊接应用功能特色:
控制方案配置明细:
总线型控制器 | IMC100R-E-X3 |
总线型伺服 | J1/J2:IS620NS012
J3/J4/J5/J6:IS620N2R8
E1/E2:IS620N2R8 |
23位绝对式编码器伺服电机 | J1/J2:ISMH2-15C30CB-A330Z
J3:ISMH1-40B30CB-A334Z
J4/J5/J6:ISMH1-10B30CB-A330Z
E1/E2:ISMH1-40B30CB-A334Z |
示教器 | ITP100-A |
总线型扩展模块 | 总线通讯模块:AM600-RTU-ECT
DI模块:AM600-1600END
DO模块:AM600-0016ETP
DA模块:AM600-4DA
AD模块:AM600-4AD |